StateSpaceRealization
StateSpaceModelのオプションで,その標準表現を指定する.
詳細


- 使用可能な設定値
-
Automatic 実現の自動的な決定 "Controllable" 可制御実現 "ControllableCompanion" 可制御同伴形実現 "Observable" 可観測実現 "ObservableCompanion" 可観測同伴形実現 - 可制御形は各入力に対応する部分系の可制御同伴形を計算し,結果を組み合せることで入手できる.
- 適切な伝達関数行列
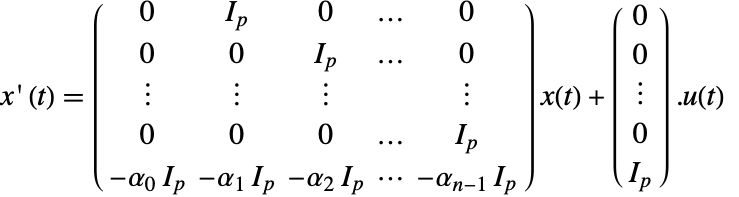
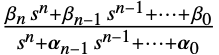 についての可制御同伴形は以下の通りである.
についての可制御同伴形は以下の通りである. -
-

- 恒等行列
 の次元は
の次元は  である.
である. - 可観測形は各出力に対応する部分系の可観測同伴形を計算し,結果を組み合せることで入手できる.
- 固有伝達関数行列
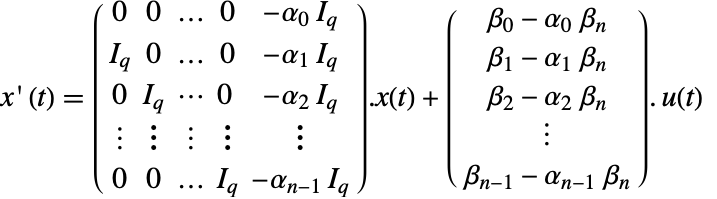
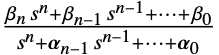 についての可観測同伴形は以下の通りである.
についての可観測同伴形は以下の通りである. -
-

- 実現は離散時間系についても同様である.
- 非固有伝達関数
 については,多項式部分がディスクリプタ変数を使って実現され,固有有理数部分は指定された形式で実現される. »
については,多項式部分がディスクリプタ変数を使って実現され,固有有理数部分は指定された形式で実現される. » - StateSpaceModel[tfm,StateSpaceRealization->Automatic]は,伝達関数モデル tfm の可制御実現を与える.
例題
すべて開くすべて閉じるスコープ (2)
特性と関係 (4)
StateSpaceRealizationは非固有伝達関数の固有部分に影響する:
Wolfram Research (2010), StateSpaceRealization, Wolfram言語関数, https://reference.wolfram.com/language/ref/StateSpaceRealization.html (2012年に更新).
テキスト
Wolfram Research (2010), StateSpaceRealization, Wolfram言語関数, https://reference.wolfram.com/language/ref/StateSpaceRealization.html (2012年に更新).
CMS
Wolfram Language. 2010. "StateSpaceRealization." Wolfram Language & System Documentation Center. Wolfram Research. Last Modified 2012. https://reference.wolfram.com/language/ref/StateSpaceRealization.html.
APA
Wolfram Language. (2010). StateSpaceRealization. Wolfram Language & System Documentation Center. Retrieved from https://reference.wolfram.com/language/ref/StateSpaceRealization.html