Wolfram言語とWolframノートブックの決定的な経験
オリジナルの技術計算環境
Wolframテクノロジーで使う一体型AIアシスタント
その他のモバイルアプリ
シンボリック計算,データに基づく洞察,深い技術的専門知識を組み合せて,AI時代のソリューションをお届けします
Wolfram Consulting
その他のWolframソリューション
教育のためのその他のソリューション
計算,科学,生活,その他のコース
学び,問題を解決し,アイディアを共有
Wolframのニュース,視点,洞察
リソース
WolframConsulting.com
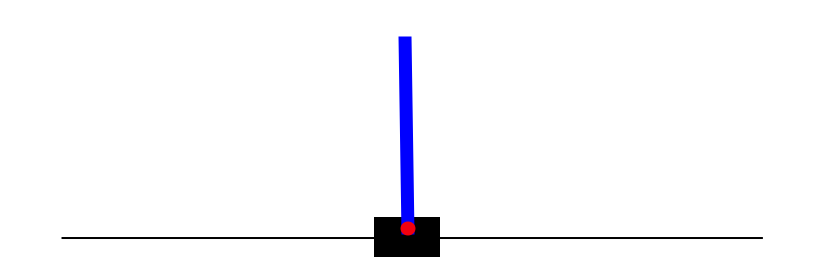
"SimulatedCartPole"環境を開く:
初期状態を観察する:
環境を可視化する:
ランダムなアクションを得る:
ランダムなアクションを取る:
アクションを取ると,通常"ObservedState"が修正される:
環境を初期状態に再設定する.初期の"ObservedState"が回復される:
環境を閉じる:
ランダムなエージェントがカートを抑制している様子を可視化する:
DeviceOpen DeviceConfigure DeviceRead DeviceWrite DeviceExecute
2019 で導入 (12.0)