HolderModel


HolderModel
ゼロ次ホールドの単一入力単一出力のモデルを表す.
HolderModel[specs]
ホールダーを指定 specs で表す.
詳細
- HolderModelは,ゼロ次ホールド(ZOH),一次ホールド(FOH),逆サンプリングとしても知られている.
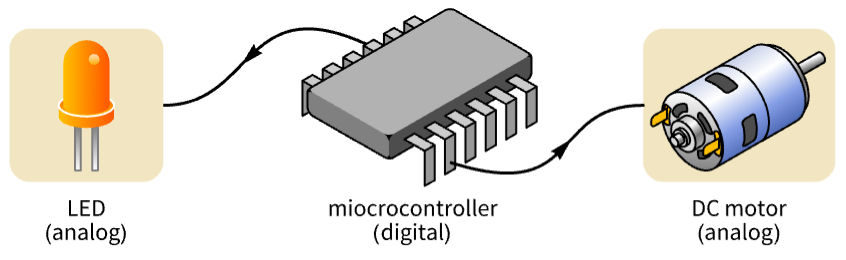
- HolderModelは,通常,物理世界または物理世界のモデルを使用して動作する場合に,デジタルのマイクロコントローラあるいはデジタル信号プロセッサからの離散時間信号を連続時間信号に変換するために使われる.
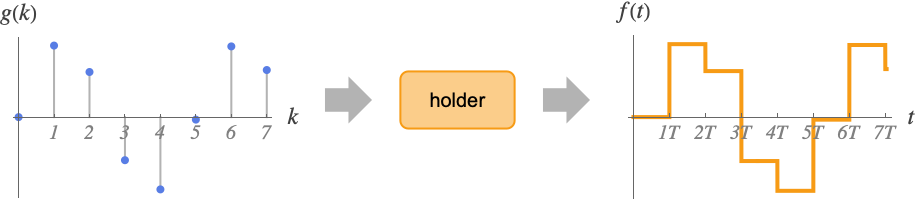
- ホールダーは,整数について定義された離散時間信号
 を取って連続時間信号
を取って連続時間信号 ![f(t)=g(TemplateBox[{{t, /, T}}, Floor])](Files/HolderModel.ja/3.png "f(t)=g(TemplateBox[{{t, /, T}}, Floor])") を生成する.
を生成する. はサンプリング周期である.これは,サンプル間で値を一定に保つ.
はサンプリング周期である.これは,サンプル間で値を一定に保つ. - 指定 spec は連想であり,以下のキーを持つことができる.
-
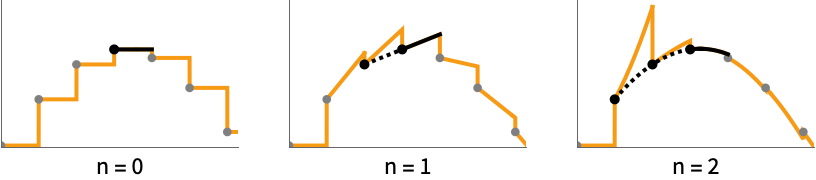
"InputVariables" {u[t]} 入力変数 "Order" 0 ホールド次数,非負の整数 "OutputVariables" {y[t]} 出力変数 "SamplingPeriod" 1 サンプリング周期 "SignalCount" 1 入出力の数 "TemporalVariable" t 一時変数 - "Order"特性は,使用する外挿次数を指定する.
 次外挿器は
次外挿器は  個のそれまでの点を使って次数
個のそれまでの点を使って次数  の補間多項式を導出する.この多項式は,次のサンプリング周期で値を外挿するために使われる.
の補間多項式を導出する.この多項式は,次のサンプリング周期で値を外挿するために使われる. - HolderModel[…]["prop"]を使ってモデルのさまざまな特性が入手できる.
- "prop"の値は spec の任意のキーあるいは以下でよい.
-
"Properties" 特性名のリスト "PropertyAssociation" 連想としての特性の名前と値 "PropertyDataset" データ集合としての特性の名前と値 {p1,p2,…} 特性 piの値
例題
すべて開く すべて閉じる例 (2)
HolderModel[]%["PropertyDataset"]r = InputOutputResponse[HolderModel[], Table[Sin[t], {t, 0, 3π}]]Show[Plot[r, {, 0, 3π}], ListPlot[Table[{t, Sin[t]}, {t, 0, 3π}], IconizedObject[«opts»]]]スコープ (9)
HolderModel[]HolderModel[<|"Order" -> 1|>]HolderModel[<|"InputVariables" -> u[t], "OutputVariables" -> y[t], "TemporalVariable" -> t|>]%["Dataset"]HolderModel[Association["DiscreteVariables" -> {Subscript[, 1][t]}, "InputVariables" -> {u[t]},
"OutputVariables" -> {y[t]}, "InitialStateValues" -> {}, "TemporalVariable" -> t,
"WhenEvent" -> Mod[t, 1] == 0, "WhenEventAction" -> {Subscript[ ... tion", "StateEquations",
"OutputExpressions", "SignalCount", "Type", "PropertyFunction", "Order", "SamplingPeriod",
"SummaryItems"}], {"InputVariables", "Order", "OutputVariables", "SamplingPeriod",
"SignalCount", "TemporalVariable"}]["Properties"]HolderModel[Association["DiscreteVariables" -> {Subscript[, 1][t]}, "InputVariables" -> {u[t]},
"OutputVariables" -> {y[t]}, "InitialStateValues" -> {}, "TemporalVariable" -> t,
"WhenEvent" -> Mod[t, 1] == 0, "WhenEventAction" -> {Subscript[ ... tion", "StateEquations",
"OutputExpressions", "SignalCount", "Type", "PropertyFunction", "Order", "SamplingPeriod",
"SummaryItems"}], {"InputVariables", "Order", "OutputVariables", "SamplingPeriod",
"SignalCount", "TemporalVariable"}]["SamplingPeriod"]HolderModel[Association["DiscreteVariables" -> {Subscript[, 1][t]}, "InputVariables" -> {u[t]},
"OutputVariables" -> {y[t]}, "InitialStateValues" -> {}, "TemporalVariable" -> t,
"WhenEvent" -> Mod[t, 1] == 0, "WhenEventAction" -> {Subscript[ ... tion", "StateEquations",
"OutputExpressions", "SignalCount", "Type", "PropertyFunction", "Order", "SamplingPeriod",
"SummaryItems"}], {"InputVariables", "Order", "OutputVariables", "SamplingPeriod",
"SignalCount", "TemporalVariable"}][{"Order", "SignalCount"}]HolderModel[Association["DiscreteVariables" -> {Subscript[, 1][t]}, "InputVariables" -> {u[t]},
"OutputVariables" -> {y[t]}, "InitialStateValues" -> {}, "TemporalVariable" -> t,
"WhenEvent" -> Mod[t, 1] == 0, "WhenEventAction" -> {Subscript[ ... tion", "StateEquations",
"OutputExpressions", "SignalCount", "Type", "PropertyFunction", "Order", "SamplingPeriod",
"SummaryItems"}], {"InputVariables", "Order", "OutputVariables", "SamplingPeriod",
"SignalCount", "TemporalVariable"}]["PropertyAssociation"]HolderModel[Association["DiscreteVariables" -> {Subscript[, 1][t]}, "InputVariables" -> {u[t]},
"OutputVariables" -> {y[t]}, "InitialStateValues" -> {}, "TemporalVariable" -> t,
"WhenEvent" -> Mod[t, 1] == 0, "WhenEventAction" -> {Subscript[ ... tion", "StateEquations",
"OutputExpressions", "SignalCount", "Type", "PropertyFunction", "Order", "SamplingPeriod",
"SummaryItems"}], {"InputVariables", "Order", "OutputVariables", "SamplingPeriod",
"SignalCount", "TemporalVariable"}]["PropertyDataset"]一次ホールドの正弦波列に対する応答のシミュレーションを行う:
Short[r1 = InputOutputResponse[HolderModel[<|"Order" -> 1|>], Table[Sin[t], {t, 0, 2.5π}]]]Show[Plot[r1, {, 0, 2.5π}, PlotRange -> All], ListPlot[Table[{t, Sin[t]}, {t, 0, 2.5π}], IconizedObject[«opts»]]]Short[r2 = InputOutputResponse[HolderModel[<|"Order" -> 1, "SamplingPeriod" -> 0.5|>], Table[Sin[t], {t, 0, 2.5π, 0.5}]]]Show[Plot[r2, {, 0, 2.5π}, PlotRange -> All], ListPlot[Table[{t, Sin[t]}, {t, 0, 2.5π, 0.5}], IconizedObject[«opts»]]]NIntegrate[Abs /@ {Sin[] - r1[[1]], Sin[] - r2[[1]]}, {, 0, 2.5π}]アプリケーション (1)
ホールダーモデルは,サンプリングされたデータ系の下位の系である:
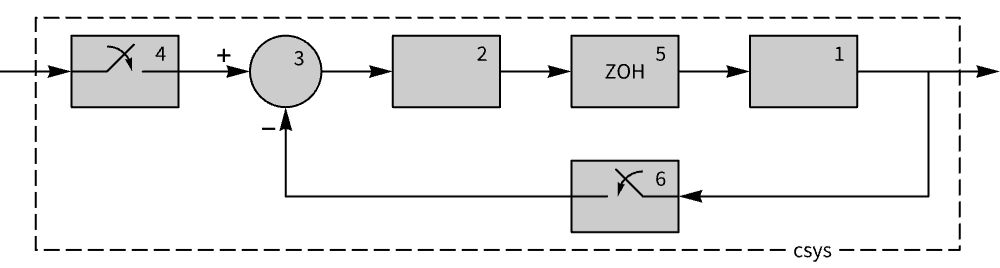
csys = SystemsConnectionsModel[{TransferFunctionModel[{{{1.}}, (1 + s)^3}, s],
TransferFunctionModel[{{{4.539074548064891 - 9.145098981931369* + 4.606282997931085*^2}},
{{0.23358983848622455 - 0.5071796769724491* + 0.2735898384862246*^2}}}, , ... ummaryItems"}], {"InputVariables", "OutputVariables", "SamplingPeriod", "SignalCount",
"TemporalVariable"}]}, {{4, 1} -> {3, 1}, {3, 1} -> {2, 1}, {2, 1} -> {5, 1}, {5, 1} -> {1, 1},
{1, 1} -> {6, 1}, {6, 1} -> {3, 2}}, {{4, 1}}, {{1, 1}}];r = InputOutputResponse[csys, 1, {t, 0, 10}]Plot[r, {t, 0, 10}]特性と関係 (3)
u = Tanh[t];
sp = 0.5;WhenEventに基づく応答:
r1 = NDSolveValue[{WhenEvent@@{Mod[t, sp] == 0, y[t] -> u}, y[0] == 0, Derivative[1][$][t] == 0, $[0] == 0}, y[t], {t, 0, 5}, DiscreteVariables -> {y[t]}]r2 = InputOutputResponse[SamplerModel[<|"SamplingPeriod" -> sp|>], u, {t, 0, 5}]Plot[{r1, r2}, {t, 0, 5}, PlotRange -> All]u = Tanh[t];
sp = 0.5;変数 ![]() は現行入力値で
は現行入力値で ![]() は前の入力の値であり,
は前の入力の値であり,![]() は経過時間の合計である:
は経過時間の合計である:
action = {Subscript[x, 1][t], Subscript[x, 2][t], 𝒯[t]} -> {u, Subscript[x, 1][t], 𝒯[t] + sp};we = WhenEvent@@{Mod[t, sp] == 0, action}sol = Solve[{Subscript[x, 1][t] == m 𝒯[t] + c, Subscript[x, 2][t] == m(𝒯[t] - sp) + c}, {m, c}]out = m t + c /. sol//Simplifyr1 = NDSolveValue[{we, Derivative[1][$][t] == 0, $[0] == 0, Subscript[x, 1][0] == 0, Subscript[x, 2][0] == 0, 𝒯[0] == 0}, out, {t, 0, 5}, DiscreteVariables -> {Subscript[x, 1][t], Subscript[x, 2][t], 𝒯[t]}]r2 = InputOutputResponse[HolderModel[<|"SamplingPeriod" -> sp, "Order" -> 1|>], u, {t, 0, 5}]Plot[{r1, r2}, {t, 0, 5}, PlotRange -> All]f = 3;
u = Sech[f t];
sp = 1 / ( 50f);sys = SystemsConnectionsModel[{SamplerModel[<|"SamplingPeriod" -> sp|>], HolderModel[<|"SamplingPeriod" -> sp|>]}, {{1, 1} -> {2, 1}}, {{1, 1}}, {{2, 1}}]InputOutputResponse[sys, u, {t, 0, π}];
Plot[{u, %[[1]]}, {t, 0, π}, PlotRange -> All]
Wolfram Research (2024), HolderModel, Wolfram言語関数, https://reference.wolfram.com/language/ref/HolderModel.html.
テキスト
Wolfram Research (2024), HolderModel, Wolfram言語関数, https://reference.wolfram.com/language/ref/HolderModel.html.
CMS
Wolfram Language. 2024. "HolderModel." Wolfram Language & System Documentation Center. Wolfram Research. https://reference.wolfram.com/language/ref/HolderModel.html.
APA
Wolfram Language. (2024). HolderModel. Wolfram Language & System Documentation Center. Retrieved from https://reference.wolfram.com/language/ref/HolderModel.html