NDSolve 的 "SymplecticPartitionedRungeKutta" 方法
引言
当数值求解哈密顿动力系统时,如果数值方法产生一个辛映射,则是有利的.
如果哈密顿可以写成分离的形式,![]() ,那么存在一类有效的显式辛数值积分方法.
,那么存在一类有效的显式辛数值积分方法.
当应用到哈密顿系统时,辛数值方法的一个重要属性是,一个附近的哈密顿大约守恒指数倍的时间(见 [BG94]、 [HL97] 和 [R99]).
哈密顿系统
一个自由度数为 ![]() 的哈密顿系统是 (1) 的特例,其中
的哈密顿系统是 (1) 的特例,其中 ![]() ,满足
,满足
如果 ![]() 是自治的(autonomous),
是自治的(autonomous),![]() . 那么
. 那么 ![]() 是一个随系统的求解保持不变的守恒量. 在应用中,这通常相应于能量守恒.
是一个随系统的求解保持不变的守恒量. 在应用中,这通常相应于能量守恒.
一种应用于哈密顿系统 (2) 的数值方法被认为是辛的(symplectic),如果它产生辛映射(symplectic map). 即,令 ![]() 是定义在域
是定义在域 ![]() 上的一个
上的一个 ![]() 变换:
变换:
一个哈密顿系统的流,是同其在正则共轭坐标和动量对形成的平面上的投影一起来描述的. 当流随着时间演变时,有向面积的和保持不变.
分区朗格-库塔方法(Partitioned Runge–Kutta Method)
有时候,可以对 (3) 的某些分量使用朗格-库塔方法积分,对其他分量,则使用一个不同的朗格-库塔方法积分. 总的 ![]() -级方案被称为分区朗格-库塔方法,而自由参数则用两个 Butcher 表(Butcher tableaux) 表示:
-级方案被称为分区朗格-库塔方法,而自由参数则用两个 Butcher 表(Butcher tableaux) 表示:
辛分区朗格-库塔(SPRK)方法
然而,对于可分离哈密顿 ![]() 则存在对应于辛分区朗格-库塔方法的显式方案.
则存在对应于辛分区朗格-库塔方法的显式方案.
一般来说,力的计算 ![]() 在计算上是主导的,因而 (6) 比 (7) 更可取,因为当稠密输出为必需的时候,有可能可以在每个时间步骤上节省一个力的计算.
在计算上是主导的,因而 (6) 比 (7) 更可取,因为当稠密输出为必需的时候,有可能可以在每个时间步骤上节省一个力的计算.
标准算法
(8) 的结构允许采用一个特别简单的实现方法(例如,见 [SC94]).
如果 ![]() ,那么算法1 实际上被简化为一个
,那么算法1 实际上被简化为一个 ![]() 阶段方案,因为它具有最先与最后相同( First Same As Last 即FSAL)的属性.
阶段方案,因为它具有最先与最后相同( First Same As Last 即FSAL)的属性.
示例
谐振子
谐振子是一个模拟将一个质点系在弹簧上的简单的哈密顿问题. 为了简单起见,考虑单位质量和弹簧常数,此时哈密顿量如下可分的形式给出:
输入
显式欧拉方法
辛算法
减少舍入误差
在某些情况下,存在有格点辛方法,可以避免一步一步的舍入误差累积,但是这种方法并不总是可能的 [ET92].
在哈密顿上的误差有一个奇怪的浮动,这其实是一个浮点运算的数值产物.
本节描述了 "SymplecticPartitionedRungeKutta" 所使用的表述,以减少这种误差的影响.
在对一个流进行数值积分时,有两种误差类型,即沿着流的误差 (along the flow) 和垂直于流的误差 (transverse to the flow). 与耗散系统相反,哈密顿系统上垂直于流的舍入误差不会渐近衰减.
对精度为 ![]() 底数为
底数为 ![]() 的算术上的数
的算术上的数 ![]() ,令
,令 ![]() 表示其的指数,而
表示其的指数,而 ![]() ,
,![]() ,为尾数:
,为尾数:![]() .
.
我们感兴趣的是寻找一个有效方法来计算 ![]() ,它实际上表示由于
,它实际上表示由于 ![]() 和
和 ![]() 指数的差异而被略掉的底数
指数的差异而被略掉的底数 ![]() 数位.
数位.
补偿总和 (Compensated Summation)
补偿总和的基本动机是仅使用 ![]() (二进制)位算术,模拟
(二进制)位算术,模拟 ![]() (二进制)位加法运算.
(二进制)位加法运算.
示例
在许多应用中,增量可能会有所不同,而运算的次数事先并不知道.
算法
补偿总和(例如见 [B87] 和 [H96])随着求和计算舍入误差,使得
示例
函数 CompensatedPlus(在 Developer` 中)执行补偿总和算法.
一个未公开的选项 CompensatedSummation 控制 NDSolve 中的内置积分算法是否采用补偿总和.
另一种算法
下面要给出另一种算法,因为它有更广泛的适用性,而且算术成本低. 其基本要素是增量 ![]() 和
和![]() .
.
补偿总和也可以用于算法3的主循环总的每次加法更新中,但是我们的实验表明,这会增加一个不可忽视的开销,而准确度上的提高却相对较小.
数值演示
舍入误差模型
在这里,谐振子 (9) 的哈密顿量的相对误差中预期舍入误差将被量化. 概率平均情况分析 (A probabilistic average case analysis) 比一个最坏情况上限 (a worst case upper bound) 优先考虑.
对于一个具有等概率偏差的一维随机游动,经过 ![]() 步后的预期绝对距离为
步后的预期绝对距离为 ![]() .
.
使用 IEEE 最近舍入模式,浮点运算 ![]() 、
、![]() 、
、![]() 、
、![]() 的相对误差满足下面界限 [K93]:
的相对误差满足下面界限 [K93]:
其中,基 ![]() 用于表示机器上的浮点数,而对于 IEEE 双精度数,
用于表示机器上的浮点数,而对于 IEEE 双精度数,![]() .
.
在下面的例子中,我们采用大小为 1/25 的固定步长,而且在区间 [0, 80000] 上一共使用 ![]() 积分步执行积分. 哈密顿量的误差在每隔 200 积分步上被采样.
积分步执行积分. 哈密顿量的误差在每隔 200 积分步上被采样.
我们采用 Yoshida 的第 8 阶 15-阶段 (FSAL) 方法 D. 对于 Yoshida 的第 6 阶 7-阶段 (FSAL) 方法,使用相同的积分步骤以及大小为 1/160 的步长,可以获得相似的结果.
不使用补偿求和
这里是谐振子 (10) 的哈密顿量的相对误差的图示,绿色为算法 1 中的标准形式,红色为算法 3 的增量形式.
在增量算法 3 中,内部阶段都具有步长的量级,而仅有的显著舍入误差出现在每个积分步骤的末尾;因此,![]() ,这与观察到的改善良好地吻合.
,这与观察到的改善良好地吻合.
这表明了对于算法 3,使用足够小的步长时,舍入误差的增加与方法的阶段数目无关,而这对于高阶问题来说特别有利.
使用补偿总和
这里显示谐振子 (1) 哈密顿量的相对误差,以展示算法 3 中不使用补偿总和(红色)和使用补偿总和(蓝色)的增量形式.
对算法 3 使用补偿总和,误差增长呈现为满足偏差为 ![]() 的一个随机游动,因此它减少了一个与步长成正比的因子.
的一个随机游动,因此它减少了一个与步长成正比的因子.
任意精度
下面显示的是使用补偿总和的算法 3 中的增量形式在使用IEEE双精度算术(蓝色)和 32 位十进制软件算术(紫色)时,谐振子 (1) 哈密顿量的相对误差.
但是,使用软件算术获得解要比使用机器算术大约慢一个数量级,因此采用减少舍入误差影响的策略是有值得的.
示例
静电波
下面是一个模拟 ![]() 个扰动静电波的非自治哈密顿(它有一个与时间有关的势能),每个静电波都具有相同的波数和振幅,但是有不同的频率
个扰动静电波的非自治哈密顿(它有一个与时间有关的势能),每个静电波都具有相同的波数和振幅,但是有不同的频率 ![]() (见 [CR91]).
(见 [CR91]).
"微分方程中的事件和不连续性" 中有对计算彭加莱截面 (Poincaré section)的一般技术的描述. 对变量指定一个空列表避免了存储数值积分的所有数据.
Toda Lattice
Toda lattice 模拟在一条线上,两两之间具有指数型相互作用的粒子. 其哈密顿量为:
使用选项来指明 NumberEigenvalues 的结果的维度(因为它不是一个显式列表),而使用InvariantErrorFunction 指定的绝对误差应该包括误差的符号(默认时用 Abs).
等谱流的一些在数值方法上的近期的工作可以参阅 [CIZ97]、[CIZ99]、[DLP98a] 和 [DLP98b].
可用方法
默认方法
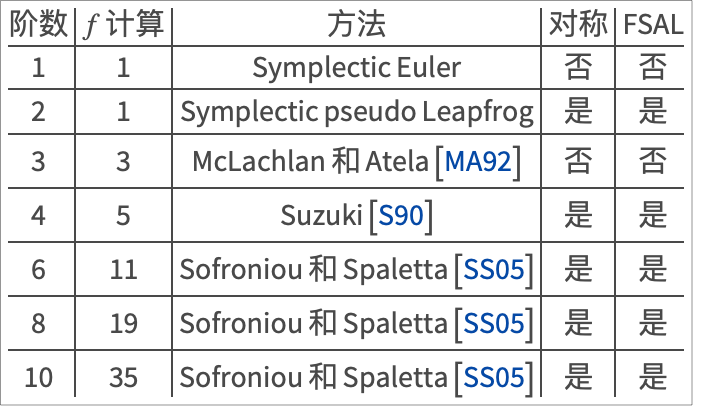
与显式朗格-库塔方法的情况不同,在文献中,高阶 SPRK 方法的系数只以数值形式给出. 例如,Yoshida [Y90] 只给出精确到14十进制数位的系数.
由于 NDSolve 对任意精度适用,用户需要一个工序来获得与在求解器中使用的精度相同的系数.
当没有系数的闭式时,对称组合系数的阶数方程可以使用 FindRoot ,从已知的机器精度解上开始,在任意精度上精化.
其它方法
由于新的 NDSolve 框架的模块设计,可以很便捷地增加一个其他的方法并且使用它,而不是用默认方法之一.
实例
自动阶数选择
鉴于目前有各种各样不同阶数的方法可供使用,拥有自动选择一个合适的方法的手段是非常有用的. 为了做到这一点,我们需要有对每种方法的性能的一个衡量.
对于一个SPRK方法性能的一个可行的衡量是阶段数目 ![]() (或者是
(或者是 ![]() ,如果该方法是 FSAL 的话).
,如果该方法是 FSAL 的话).
给定一个步长 ![]() 和对一个阶数为
和对一个阶数为 ![]() 的方法的一个积分步骤的工作估计
的方法的一个积分步骤的工作估计 ![]() ,每个单位步骤的工作量由下式给出:
,每个单位步骤的工作量由下式给出: ![]() .
.
令 ![]() 表示方法阶数的一个非空集合,
表示方法阶数的一个非空集合,![]() 表示
表示 ![]() 的第
的第 ![]() 个元素,而
个元素,而 ![]() 表示基数(元素数目).
表示基数(元素数目).
一个先决条件是估计阶数为 ![]() 的数值方法的初始步骤
的数值方法的初始步骤 ![]() 的一个程序(例如,见 [GSB87] 或者 [HNW93]).
的一个程序(例如,见 [GSB87] 或者 [HNW93]).
第一种要考虑的情况是初始步骤估计 ![]() 可以自由选择. 通过从低阶开始引导,下面的算法寻找局部最小化每个单位步骤工作量的阶数.
可以自由选择. 通过从低阶开始引导,下面的算法寻找局部最小化每个单位步骤工作量的阶数.
要考虑的第二种情况是当初始步骤估计 h 给定的时候. 那么,下面算法给出了最小化计算代价的方法阶数,同时满足给定的绝对和相对局部误差容差.
算法 4 和 5 是探索式的,因为最优步长和阶数可能会在积分过程中改变,虽然辛积分往往包含有固定的选择. 尽管如此,这两种算法都综合了积分的突出信息,如局部误差容差,系统维度,和初始条件,以避免不当的选择.
实例
考虑开普勒问题,它描述一个质点,在来自原点与距离的平方成反比的吸引力作用下,在位形平面内的运动:
算法 4
下面在最大绝对相误差相对工作量的log-log图上,显示对于开普勒问题(1),根据算法4,在不同的容差上,自动选择的方法.
可以看出,算法在保持最优方法方面表现良好,虽然它有点过早早切换到第 8 阶方法.
这可以通过如下事实解释:起始步长例程是以低阶导数估计为基础的,而这对于选择高阶方法来说,可能并不理想.
算法 5
下面在最大绝对相误差相对工作量的log-log图上,显示对于开普勒问题(1),根据算法5,使用绝对局部误差容差 10-9,和步长 1/16、1/32、1/64、1/128 时,自动选择的方法.
对于较大的步长,则选择高阶方法,而对于较小的步长,则选择低阶方法. 在每种情况下,方法的选择都使工作量最小化,以满足给定的容差.
选项总结
选项名 | 默认值 | |
| "Coefficients" | "SymplecticPartitionedRungeKuttaCoefficients" | 指定辛分区朗格-库塔方法的系数 |
| "DifferenceOrder" | Automatic | 指定方法的局部准确度的阶数 |
| "PositionVariables" | {} | 指定哈密顿表述中位置变量的一个列表 |
方法 "SymplecticPartitionedRungeKutta" 的选项.