GradientOrientationFilter[data,r]
gives the local orientation parallel to the gradient of data, computed using discrete derivatives of a Gaussian of pixel radius r, returning values between ![]() and
and ![]() .
.


GradientOrientationFilter
GradientOrientationFilter[data,r]
gives the local orientation parallel to the gradient of data, computed using discrete derivatives of a Gaussian of pixel radius r, returning values between ![]() and
and ![]() .
.
GradientOrientationFilter[data,{r,σ}]
uses a Gaussian with standard deviation σ.
Details and Options
- GradientOrientationFilter is used to obtain the orientation of rapid-intensity change for applications such as texture and fingerprint analysis, as well as object detection and recognition.
- The data can be any of the following:
-
list arbitrary-rank numerical array image arbitrary Image or Image3D object - GradientOrientationFilter[data,r] uses standard deviation
 .
. - GradientOrientationFilter[data,…] returns the orientation as hyperspherical polar coordinate angles. For data arrays of dimensions
 , for
, for  , the resulting array will be of dimensions
, the resulting array will be of dimensions  . The
. The  tuples in the resulting array denote the
tuples in the resulting array denote the  -spherical angles.
-spherical angles. - By default, defined angles are returned in the interval
 and the value
and the value  is used for undefined orientation angles.
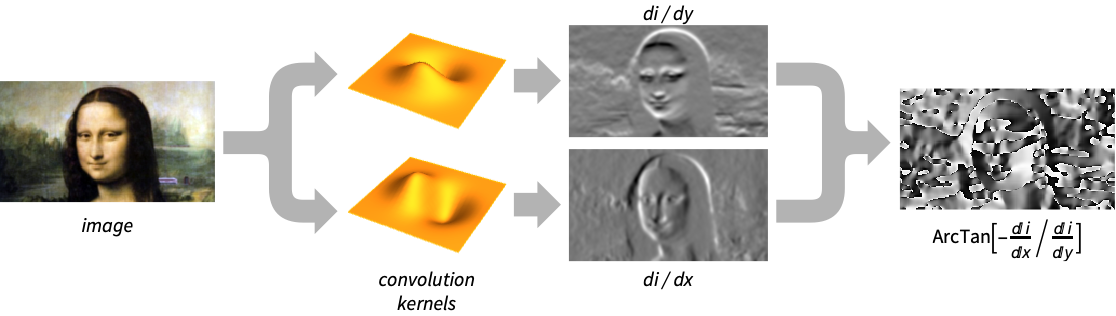
is used for undefined orientation angles. - For a single channel image and for data, the gradient
 at a pixel position is approximated using discrete derivatives of Gaussians in each dimension.
at a pixel position is approximated using discrete derivatives of Gaussians in each dimension. - For multichannel images, define the Jacobian matrix
 to be
to be  , where
, where  is the gradient for channel
is the gradient for channel  . The orientation is based on the direction of the eigenvector of
. The orientation is based on the direction of the eigenvector of  that has the largest magnitude eigenvalue. This is the direction that maximizes the variation of pixel values.
that has the largest magnitude eigenvalue. This is the direction that maximizes the variation of pixel values. - For data arrays with
 dimensions, a coordinate system that corresponds to Part indices is assumed such that a coordinate {x1,…,xn} corresponds to data[[x1,…,xn]]. For images, the filter is effectively applied to ImageData[image].
dimensions, a coordinate system that corresponds to Part indices is assumed such that a coordinate {x1,…,xn} corresponds to data[[x1,…,xn]]. For images, the filter is effectively applied to ImageData[image]. - In 1D, the orientation for nonzero gradients is always {0}, and undefined otherwise.
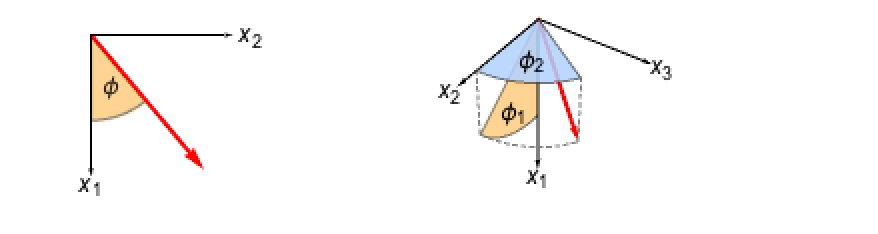
- In 2D, the orientation is the angle
 such that
such that  is a unit vector parallel to
is a unit vector parallel to  .
. - In 3D, the orientation is represented by the angles
 such that
such that  is a unit vector parallel to the computed gradient.
is a unit vector parallel to the computed gradient. - For
 -dimensional data with
-dimensional data with  , the orientation is given by angles
, the orientation is given by angles  such that
such that  is a unit vector in the direction of the computed gradient.
is a unit vector in the direction of the computed gradient. - GradientOrientationFilter[image,…] always returns a single-channel image for 2D images and a two-channel image for 3D images. The result is of the same dimensions as image.
- The following options can be specified:
-
Method Automatic convolution kernel Padding "Fixed" padding method WorkingPrecision Automatic the precision to use - The following suboptions can be given to Method:
-
"DerivativeKernel" "Bessel" convolution kernel "UndefinedOrientationValue" 
return value when orientation is undefined - Possible settings for "DerivativeKernel" include:
-
"Bessel" standardized Bessel derivative kernel, used for Canny edge detection "Gaussian" standardized Gaussian derivative kernel, used for Canny edge detection "ShenCastan" first-order derivatives of exponentials "Sobel" binomial generalizations of the Sobel edge-detection kernels {kernel1,kernel2,…} explicit kernels specified for each dimension - With a setting Padding->None, GradientOrientationFilter[data,…] normally gives an array or image smaller than data.
Examples
open all close allBasic Examples (3)
Gradient orientation of a multichannel image:
GradientOrientationFilter[[image], 4]//ImageAdjustGradient orientation of a 3D image:
GradientOrientationFilter[[image], 2]Gradient orientation filter of a 2D array:
GradientOrientationFilter[(| | | | | |
| - | - | - | - | - |
| 0 | 0 | 1 | 0 | 0 |
| 0 | 1 | 1 | 1 | 0 |
| 1 | 1 | 1 | 1 | 1 |
| 0 | 1 | 1 | 1 | 0 |
| 0 | 0 | 1 | 0 | 0 |), 1]//MatrixFormScope (7)
Data (5)
Gradient orientation of a vector:
GradientOrientationFilter[{1, 1, 0, 1, 0, 1, 1}, 1]Compute gradient orientation symbolically:
GradientOrientationFilter[{{a, b}, {a, b}}, 1]//SimplifyGradient orientation of a binary image:
GradientOrientationFilter[[image], 1]Gradient orientation of a grayscale image:
GradientOrientationFilter[[image], 11]Gradient orientation of a diamond-shaped object:
GradientOrientationFilter[[image], 2]Parameters (2)
Options (8)
Padding (3)
By default, a "Fixed" padding is used:
GradientOrientationFilter[[image], 5]//ImageAdjustGradientOrientationFilter[[image], 5, Padding -> "Periodic"]//ImageAdjustPadding->None normally returns an image smaller than the input image:
GradientOrientationFilter[[image], {19, 3}, Padding -> None]Method (2)
By default, the "Bessel" kernel is used to compute the gradient derivatives:
b = GradientOrientationFilter[[image], 2]Use the "ShenCastan" derivative kernel:
s = GradientOrientationFilter[[image], 2, Method -> "ShenCastan"]The difference between the two methods:
b - sSpecify the value for undefined orientation:
GradientOrientationFilter[{1, 1, 0, 1}, 1, Method -> {"UndefinedOrientationValue" -> None}]WorkingPrecision (3)
MachinePrecision is by default used with integer arrays:
GradientOrientationFilter[{1, 1, 0, 1, 0, 1, 1}, 1]Perform exact computation instead:
GradientOrientationFilter[{1, 1, 0, 1, 0, 1, 1}, 1, WorkingPrecision -> ∞]With real arrays, the precision of the input is used by default:
GradientOrientationFilter[N[{1, 1, 0, 1, 0, 1, 1}, 2], 1]WorkingPrecision is ignored when filtering images:
GradientOrientationFilter[[image], 5, WorkingPrecision -> Infinity]An image of a real type is always returned:
ImageType[%]Applications (5)
Identify the dominant orientations in a noisy image:
img = [image];
o = Flatten@ImageData@GradientOrientationFilter[img, 3];
w = Flatten@ImageData@GradientFilter[img, 3];Compute and visualize the histogram distribution of weighted orientations:
𝒜 = WeightedData[o, w];
𝒟 = HistogramDistribution[𝒜];
Plot[PDF[𝒟, x], {x, -π / 2, π / 2}, Filling -> Axis, PlotRange -> All, Ticks -> {Range[-π / 2, π / 2, π / 4]}]Compute the histogram of oriented gradient (HOG) for an image, where each pixel casts a vote weighted by its gradient magnitude in the bin corresponding to its local orientation:
HOG[img_, nbins_] :=
Module[{mag, ori, mat},
mag = GradientFilter[img, 1];
ori = GradientOrientationFilter[img, 1, Method -> {"UndefinedOrientationValue" -> 0}];
mat = ImageCooccurrence[{mag, ImageAdjust[ori]},
nbins, {{1}}];
BarChart[Total[mat * Range[0, 1 - 1 / nbins, 1 / nbins]], ChartLabels -> Join[{-(π/2)}, Table["", {nbins - 2}], {(π/2)}], Axes -> {True, False}]
];hog = HOG[[image], 10]Visualize the gradient vectors of an image:
img = [image];
dims = ImageDimensions[img];
dirs = ImageData[GradientOrientationFilter[img, 5]];
magnitudes = ImageData[GradientFilter[img, 5]];
orientations = MapThread[#1{-Sin[#2], Cos[#2]}&, {magnitudes, dirs}, 2];
Show[img, ListVectorPlot[MapIndexed[{{#2[[2]], dims[[2]] - #2[[1]]}, #1}&, orientations, {2}], VectorColorFunction -> (Yellow&), VectorScaling -> Automatic]]Express orientations in the standard image coordinate system:
i = [image];
orientation = ImageData[GradientOrientationFilter[i, 5]];
orientation = Image@ArcTan[Sin[orientation], -Cos[orientation]];Visualize the orientation of points on the boundary of the glyph:
pos = RandomChoice[ImageValuePositions[MorphologicalPerimeter[Binarize[i, {0, .5}]], 1], 25];
Show[i, Graphics[Table[{Orange, Arrowheads[{-.02, .02}],
o = ImageValue[orientation, p];
Arrow[p + # * {Cos[o], Sin[o]}& /@ {-15, 15}]}, {p, pos}]]]Show the orientation of features in a fingerprint:
i = [image];r = RidgeFilter[i, 1.5]//ImageAdjustc = (o = GradientOrientationFilter[%, 4])//ImageAdjust//ColorizeImageCompose[i, {c, .5}]Properties & Relations (2)
GradientOrientationFilter is invariant to the size of numbers in the data:
GradientOrientationFilter[(| | | | | |
| - | - | - | - | - |
| 0 | 0 | 1 | 0 | 0 |
| 0 | 1 | 1 | 1 | 0 |
| 1 | 1 | 1 | 1 | 1 |
| 0 | 1 | 1 | 1 | 0 |
| 0 | 0 | 1 | 0 | 0 |), 1]//MatrixFormGradientOrientationFilter[10(| | | | | |
| - | - | - | - | - |
| 0 | 0 | 1 | 0 | 0 |
| 0 | 1 | 1 | 1 | 0 |
| 1 | 1 | 1 | 1 | 1 |
| 0 | 1 | 1 | 1 | 0 |
| 0 | 0 | 1 | 0 | 0 |), 1]//MatrixFormGradient orientation filtering of an image gives a grayscale image of a real type:
GradientOrientationFilter[[image], 3]ImageType[%]Text
Wolfram Research (2012), GradientOrientationFilter, Wolfram Language function, https://reference.wolfram.com/language/ref/GradientOrientationFilter.html (updated 2015).
CMS
Wolfram Language. 2012. "GradientOrientationFilter." Wolfram Language & System Documentation Center. Wolfram Research. Last Modified 2015. https://reference.wolfram.com/language/ref/GradientOrientationFilter.html.
APA
Wolfram Language. (2012). GradientOrientationFilter. Wolfram Language & System Documentation Center. Retrieved from https://reference.wolfram.com/language/ref/GradientOrientationFilter.html