EstimatorRegulator
EstimatorRegulator[sspec,{l,κ}]
系の指定 sspec について,推定器ゲイン l と調整器ゲイン κ を持つ出力フィードバックコントローラを与える.
EstimatorRegulator[…,"prop"]
特性"prop"の値を与える.
詳細とオプション


- EstimatorRegulatorは,観測器コントローラ,あるいは推定器コントローラとしても知られている.
- EstimatorRegulatorは,推定器と調整コントローラまたは追跡コントローラからなる制御系の組立てに使われる.
- 調整コントローラは系を乱そうとする外乱
 があっても系を平衡状態に保とうとする.典型的な例として,直立した倒立振子や水平飛行中の航空機等が挙げられる.
があっても系を平衡状態に保とうとする.典型的な例として,直立した倒立振子や水平飛行中の航空機等が挙げられる. - 調整コントローラは
 の形の制御規則で与えられる.ただし,
の形の制御規則で与えられる.ただし, は計算されたゲイン行列である.
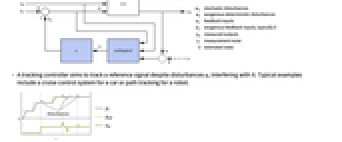
は計算されたゲイン行列である. - 追跡コントローラは,それを妨害する外乱
 があっても参照信号を追跡しようとする.典型的な例として,自動車のクルーズコントロールシステムやロボットの経路追跡が挙げられる.
があっても参照信号を追跡しようとする.典型的な例として,自動車のクルーズコントロールシステムやロボットの経路追跡が挙げられる. - 追跡コントローラは
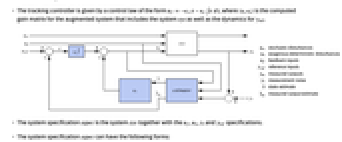
 の形の制御規則で与えられる.ただし,
の形の制御規則で与えられる.ただし, は系 sys と
は系 sys と  のダイナミクスを含む拡張系のための計算されたゲイン行列である.
のダイナミクスを含む拡張系のための計算されたゲイン行列である. - 系の指定 sspec は,系 sys と uf,ue,yt,yrefの指定である.
- 系の指定 sspec は以下の形でよい.
-
StateSpaceModel[…] 線形制御入力と線形状態 AffineStateSpaceModel[…] 線形制御入力と非線形状態 NonlinearStateSpaceModel[…] 非線形制御入力と非線形状態 SystemModel[…] 一般的な系のモデル <…> Associationとして与えられる詳細な系の指定 - 系の指定の詳細は次のキーを持つことができる.
-
"InputModel" sys モデルの任意のもの "FeedbackInputs" All フィードバック入力 uf "ExogenousInputs" None 外因性入力 ue "MeasuredOutputs" All 測定された出力 ym "TrackedOutputs" None 追跡された出力 yt - 入力と出力は以下の形でよい.
-
{num1,…,numn} StateSpaceModel,AffineStateSpaceModel,NonlinearStateSpaceModelで使われる番号付きの入力または出力 numi {name1,…,namen} SystemModelで使われる名前付きの入力または出力 namei All すべての入力または出力を使う None 入力または出力は使わない - 推定器ゲイン l は,EstimatorGains,LQEstimatorGains,DiscreteLQEstimatorGainsを使って計算できる.
- フィードバックゲイン κ は,StateFeedbackGains,LQRegulatorGains,LQOutputRegulatorGains,DiscreteLQRegulatorGainsを使って計算できる.
- EstimatorRegulator[…,"Data"]は,cd["prop"]の形で追加的な特性の抽出に使えるSystemsModelControllerDataオブジェクト cd を返す.
- EstimatorRegulator[…,"prop"]を使って cd["prop"]の値を直接得ることができる.
- 次は,特性"prop"の可能な値である.
-
"ClosedLoopPoles" "ClosedLoopSystem"の極 "ClosedLoopSystem" 系 csys {"ClosedLoopSystem",cspec} 閉ループ系の形に対する詳細な制御 "ControllerModel"  , ue, ymを入力として,ufを出力として持つモデル cm
, ue, ymを入力として,ufを出力として持つモデル cm"Design" コントローラ設計のタイプ "DesignModel" 設計に使われるモデル "EstimatorGains" ゲイン行列 ℓ "EstimatorRegulatorModel" モデル erm "ExogenousInputs" sys の決定論的入力と非フィードバック入力 ue "FeedbackGains" ゲイン行列 κ またはそれに相当するもの "FeedbackGainsModel" モデル gm または{gm1,gm2} "FeedbackInputs" フィードバックに使われる sys の入力 uf "InputModel" 入力モデル sys "InputCount" sys の入力 u の数 "MeasuredOutputs" sys の測定された出力 ym "OpenLoopPoles" テイラー(Taylor)線形化 sys の極 "OutputCount" sys の出力 y の数 "SamplingPeriod" sys のサンプリング周期 "StateEstimatorModel" モデル sem "StateOutputEstimatorModel" モデル soem "StateCount" sys の状態 x の数 "TrackedOutputs" 追跡された sys の出力 yt - 次は,cspec の可能なキーである.
-
"InputModel" icsys の入力モデル "Merge" csys をマージするかどうか "ModelName" csys の名前 "NoisyOutputs" ノイズがある ymの部分集合 - 次は,調整器のレイアウトの線図である.
- 次は,追跡器のレイアウトの線図である.
例題
すべて開くすべて閉じる例 (8)
EstimatorRegulatorを構築する:
スコープ (30)
工場モデル (5)
連続時間StateSpaceModel:
離散時間StateSpaceModel:
ディスクリプタStateSpaceModel:
ゲイン集合のあるAffineStateSpaceModel:
集合またはゲインがあるNonlinearStateSpaceModel:
特性 (9)
デフォルトで,EstimatorRegulatorは推定器と調整器からなるコントローラを返す:
このモデルでは,フィードバック入力は直接フィードバックされる:
追跡 (5)
閉ループ系 (3)
工場の閉ループ系をEstimatorRegulatorで組み立てる:
アプリケーション (11)
特性と関係 (7)
閉ループ極は,推定器および状態フィードバック設計のものである:
StateFeedbackGainsおよびEstimatorGainsからのゲインを使って組み立てられた推定器調整器:
推定器調整器はゲインまたはコントローラデータオブジェクトを使って組み立てられる:
LQRegulatorGainsおよびEstimatorGainsからのゲインを使って組み立てられた推定器調整器:
推定器調整器はゲインまたはコントローラデータオブジェクトを使って組み立てられる:
DiscreteLQRegulatorGainsおよびDiscreteLQEstimatorGainsからのゲインを使って組み立てられた推定器調整器:
LQGRegulatorはEstimatorRegulatorを使って組み立てられる:
安定化可能な系の制御不可能な極は推定器調整器の影響を受けない:
推定器ゲインの結果がより大きいと,応答は速くなるがノイズが多くなる:
テキスト
Wolfram Research (2010), EstimatorRegulator, Wolfram言語関数, https://reference.wolfram.com/language/ref/EstimatorRegulator.html (2021年に更新).
CMS
Wolfram Language. 2010. "EstimatorRegulator." Wolfram Language & System Documentation Center. Wolfram Research. Last Modified 2021. https://reference.wolfram.com/language/ref/EstimatorRegulator.html.
APA
Wolfram Language. (2010). EstimatorRegulator. Wolfram Language & System Documentation Center. Retrieved from https://reference.wolfram.com/language/ref/EstimatorRegulator.html