SystemModelMeasurements
SystemModelMeasurements[sspec]
系の指定 sspec についての測定特性を計算する.
SystemModelMeasurements[sspec,prop]
特性 prop を計算する.
SystemModelMeasurements[sim,…]
SystemModelSimulationDataオブジェクト sim の特性を計算する.
詳細とオプション



- SystemModelMeasurementsは,一般に,系がステップ入力にどのように応答するかを測ることで系のパフォーマンスと品質を数量化するために使われる.
- 測定値は安定した系についてしか意味をなさない.入力が制限されている系は出力も制限されるのである.
- 系 sys の形には以下がある.
-
StateSpaceModel[…] 状態空間モデル TransferFunctionModel[…] 伝達関数モデル AffineStateSpaceModel[…] アフィン状態空間モデル NonlinearStateSpaceModel[…] 非線形状態空間モデル DiscreteInputOutputModel[…] 離散入出力モデル SystemModel[…] 一般的なシステムモデル <…> Associationとして与えられる詳細な系の指定 sspec - 系の指定 sspec は以下のキーを持つことができる.
-
"Model" sys 入力があるモデルの任意のもの "SimulationInterval" Automatic シミュレーション間隔{tinit,tfinal} "Inputs" All オンにする入力{u1,…} "Outputs" Automatic 測定する変数{y1,…} - 複数の入力がある系については,測定は各入力を一つずつオンにして行われる.
- 測定特性は,通常,測定される出力 y の初期値 yinitと最終値 yfinalに依存する.
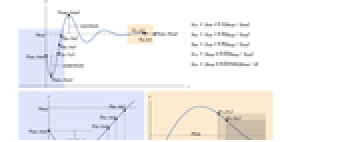
- 時間特性 prop には以下がある.
-
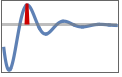
"RiseTime" 出力が最終値の10%から90%に変化するまでの時間 
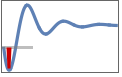
"DelayTime" 出力が最終値の50%に到達するまでの時間 
"TransientTime" 出力渡過が落ち着くまでの時間  ,つまり,
,つまり, のとき
のとき ![TemplateBox[{{{y, (, t, )}, -, {y, _, {(, final, )}}}}, Abs]/max_t TemplateBox[{{{y, (, t, )}, -, {y, _, {(, final, )}}}}, Abs]<=0.02](Files/SystemModelMeasurements.ja/10.png "TemplateBox[{{{y, (, t, )}, -, {y, _, {(, final, )}}}}, Abs]/max_t TemplateBox[{{{y, (, t, )}, -, {y, _, {(, final, )}}}}, Abs]<=0.02")
"SettlingTime" 出力が落ち着くまでの時間  ,つまり,
,つまり, のとき
のとき 
"MinValueTime" 出力が最小値 yminに達するまでの時間 tmin,つまり, 
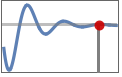
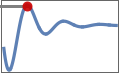
"MaxValueTime" 出力が最大値 ymaxに達するまでの時間 tmax,つまり, 
- 値特性 prop には以下がある.
-
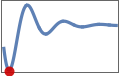
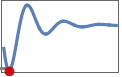
"InitialValue" 初期値 yinit,つまり 
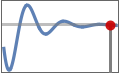
"FinalValue" 最終値 yfinal,つまり 
"MaxOvershootPercent" yfinalを超える信号の最大パーセント.つまり, 
"MaxUndershootPercent" yinitを超える信号の最大パーセント.つまり, 
"MinValue" 最小値 
"MaxValue" 最大値 
"SettlingMinValue" 出力が立ち上がった後の - 最小値 ysmin
.つまり, のとき
のとき 
"SettlingMaxValue" - 出力が立ち上がった後の最大値
ysmax.つまり, のとき
のとき
- 応答特性 prop には以下がある.
-
InterpolatingFunction[…] "Response" 応答信号 
"Plot" 応答プロット - 次は,使用可能なオプションである.
-
Method Automatic 測定法 ProgressReporting $ProgressReporting 進捗状況の表示制御 TargetUnits None 測定特性の単位 - Method設定はMethod{"sub1"val1,…}の形を取る.
- Methodのサブオプション"subi"には以下がある.
-
"RiseTimeLowerThreshold" 0.1 立ち上がり時間の開始時における信号変化の割合 "RiseTimeUpperThreshold" 0.9 立ち上がり時間の終了時における信号変化の割合 "DelayTimeThreshold" 0.5 遅延時間の終了時における信号変化の割合 "SettlingTimeThreshold" 0.02 整定時間閾値 - オプションTargetUnitsは測定特性の数量の単位を制御する.
-
None 単位なし(デフォルト) "Unit" モデルで定義された単位 "DisplayUnit" モデルで定置された表示単位 unit 明示的な単位 {unitt,unit} 時間とデータの単位
例題
すべて開くすべて閉じるスコープ (13)
基本的な用法 (4)
SystemModelの測定値を計算する:
AffineStateSpaceModelの測定値を計算する:
離散多入力多出力(MIMO)StateSpaceModelの測定値を計算する:
SystemModelSimulationDataの測定値を計算する:
特性 (5)
オプション (7)
ProgressReporting (1)
ProgressReportingで進捗報告を制御する:
アプリケーション (7)
基本的なアプリケーション (4)
ボールとビーム (1)
カメラの安定装置 (1)
クワッドコプタードローン (1)
EstimatorRegulatorで観測器を導入し,閉ループ系を作成する:
特性と関係 (2)
"Response"測定特性はSystemModelSimulateで計算される:
UnitStepを入力とするシミュレーションを行って応答を抽出する:
"Plot"測定特性はSystemModelPlotで計算される:
SystemModelPlotにはプロットを望みに応じてカスタマイズするための複数のオプションがある:
関連リンク
テキスト
Wolfram Research (2022), SystemModelMeasurements, Wolfram言語関数, https://reference.wolfram.com/language/ref/SystemModelMeasurements.html.
CMS
Wolfram Language. 2022. "SystemModelMeasurements." Wolfram Language & System Documentation Center. Wolfram Research. https://reference.wolfram.com/language/ref/SystemModelMeasurements.html.
APA
Wolfram Language. (2022). SystemModelMeasurements. Wolfram Language & System Documentation Center. Retrieved from https://reference.wolfram.com/language/ref/SystemModelMeasurements.html