SystemModelMeasurements
SystemModelMeasurements[sspec]
计算系统规范 sspec 的测量属性.
SystemModelMeasurements[sspec,prop]
计算属性 prop.
SystemModelMeasurements[sim,…]
计算 SystemModelSimulationData 对象 sim 的属性.
更多信息和选项


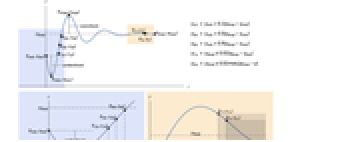

- SystemModelMeasurements 通常通过测量系统如何响应阶跃输入来实现对系统性能和质量的量化.
- 测量仅对稳定系统有意义,即有界输入导致有界输出的系统.
- 系统 sys 可以有以下形式:
-
StateSpaceModel[…] 状态空间模型 TransferFunctionModel[…] 传递函数模型 AffineStateSpaceModel[…] 仿射状态空间模型 NonlinearStateSpaceModel[…] 非线性状态空间模型 DiscreteInputOutputModel[…] 离散输入输出模型 SystemModel[…] 一般系统模型 <…> 作为 Association 给出的详细系统规范 sspec - 系统规范 sspec 可以具有以下键:
-
"Model" sys 任何一个有输入的模型 "SimulationInterval" Automatic 模拟区间 {tinit,tfinal} "Inputs" All 打开 {u1,…} 的输入 "Outputs" Automatic 测量 {y1,…} 的变量 - 对于具有多个输入的系统,测量是在每次打开一个输入的情况下执行的.
- 测量属性通常取决于测量输出 y 的初始值 yinit 和最终值 yfinal.
- 时间属性 prop 包括:
-
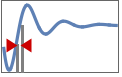
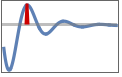
"RiseTime" 时间 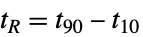 ,使得输出从最终值的 10% 变为 90%
,使得输出从最终值的 10% 变为 90%
"DelayTime" 时间  ,使得输出达到最终值的 50%
,使得输出达到最终值的 50%
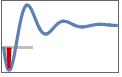
"TransientTime" 时间  ,使得输出瞬变至消退,即对于
,使得输出瞬变至消退,即对于  ,
,![TemplateBox[{{{y, (, t, )}, -, {y, _, {(, final, )}}}}, Abs]/max_t TemplateBox[{{{y, (, t, )}, -, {y, _, {(, final, )}}}}, Abs]<=0.02](Files/SystemModelMeasurements.zh/10.png "TemplateBox[{{{y, (, t, )}, -, {y, _, {(, final, )}}}}, Abs]/max_t TemplateBox[{{{y, (, t, )}, -, {y, _, {(, final, )}}}}, Abs]<=0.02")
"SettlingTime" 时间  ,使得输出稳定,即对于
,使得输出稳定,即对于  ,
,
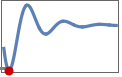
"MinValueTime" 时间 tmin,使得输出达到最小值 ymin,即 
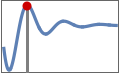
"MaxValueTime" 时间 tmax,使得输出达到最大值 ymax,即 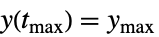
- 值的属性 prop 包括:
-
"InitialValue" 初始值 yinit,即 
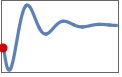
"FinalValue" 最终值 yfinal,即 
"MaxOvershootPercent" 信号超出 yfinal 的最大百分比,即 
"MaxUndershootPercent" 信号超出 yinit 的最大百分比,即 
"MinValue" 最小值 
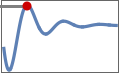
"MaxValue" 最大值 
"SettlingMinValue" 输出上升后的 - 最小值
ysmin,即对于 ,
,
"SettlingMaxValue" - 输出上升后的
ysmax,即对于- 最小值
 ,
,
- 响应属性 prop 包括:
-
InterpolatingFunction[…] "Response" 响应信号 
"Plot" 响应图 - 可以给出以下选项:
-
Method Automatic 测量方法 ProgressReporting $ProgressReporting 控制进度显示 TargetUnits None 测量属性中使用的单位 - Method 设置采取的形式为 Method{"sub1"val1,…}.
- Method 子选项 "subi" 包括:
-
"RiseTimeLowerThreshold" 0.1 上升时间开始时信号变化的分数 "RiseTimeUpperThreshold" 0.9 上升时间结束时信号变化的分数 "DelayTimeThreshold" 0.5 延迟时间结束时信号变化的分数 "SettlingTimeThreshold" 0.02 稳定时间阈值 - 选项 TargetUnits 控制测量属性中量的单位:
-
None 没有单位(默认) "Unit" 模型中定义的单位 "DisplayUnit" 模型中定义的显示出来的单位 unit 明确的单位 {unitt,unit} 时间和数据的单位
范例
打开所有单元关闭所有单元范围 (13)
基本用法 (4)
计算 SystemModel 的测量值:
计算 AffineStateSpaceModel 的测量值:
计算离散多输入多输出 StateSpaceModel 的测量值:
计算 SystemModelSimulationData 的测量值:
选项 (7)
ProgressReporting (1)
使用 ProgressReporting 控制进度报告:
应用 (7)
基本应用 (4)
相机稳定器 (1)
四旋翼无人机 (1)
属性和关系 (2)
测量属性 "Response" 通过 SystemModelSimulate 计算:
使用 UnitStep 作为输入进行仿真并提取响应:
测量属性 "Plot" 通过 SystemModelPlot 计算:
SystemModelPlot 有多个选项可以根据需要自定义绘图:
文本
Wolfram Research (2022),SystemModelMeasurements,Wolfram 语言函数,https://reference.wolfram.com/language/ref/SystemModelMeasurements.html.
CMS
Wolfram 语言. 2022. "SystemModelMeasurements." Wolfram 语言与系统参考资料中心. Wolfram Research. https://reference.wolfram.com/language/ref/SystemModelMeasurements.html.
APA
Wolfram 语言. (2022). SystemModelMeasurements. Wolfram 语言与系统参考资料中心. 追溯自 https://reference.wolfram.com/language/ref/SystemModelMeasurements.html 年