FullInformationOutputRegulator
✖
FullInformationOutputRegulator
詳細とオプション


- FullInformationOutputRegulatorは,sys の出力をゼロに駆動し,一般に系に対する既知の入力を抑制したり追跡したりする調整器を返す.
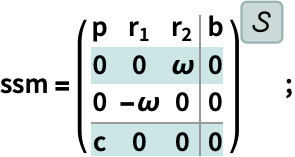
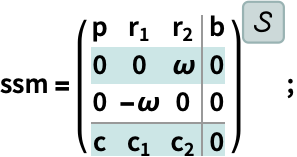
- 系 sys 状態方程式
 および
および  と出力
と出力  を持つとみなされる.
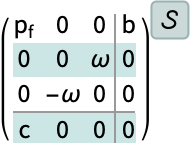
を持つとみなされる. は可制御入力である.状態
は可制御入力である.状態  は入力
は入力  の影響を受けず,出力関数
の影響を受けず,出力関数  で示されるように,抑制または追跡のための信号のモデル化に使われる.
で示されるように,抑制または追跡のための信号のモデル化に使われる. - 調整期がゼロに駆動する典型的な出力関数

-

状態  の影響
の影響  を抑制する
を抑制する
 が
が  を追跡するようにする
を追跡するようにする - 系 sys は,StateSpaceModel,AffineStateSpaceModelあるいはNonlinearStateSpaceModelでよい.
- 計算された状態フィードバック
 は,
は, を使い,操作点付近で sys を調整する.
を使い,操作点付近で sys を調整する. - 状態フィードバック
 は
は  の形を取る.ただし,
の形を取る.ただし, ,
, であり,
であり, は rspec に従って計算される.
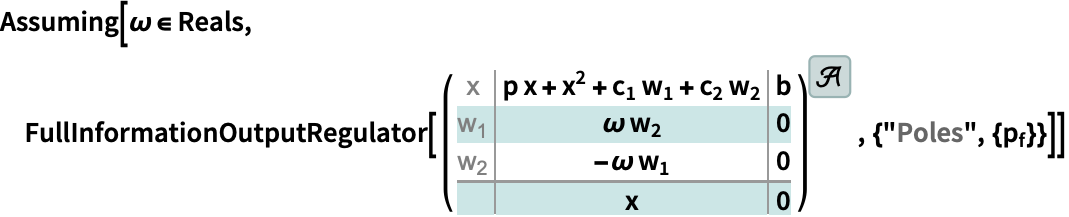
は rspec に従って計算される. - 使用可能な調整器指定 rspec
-
{"Poles",{p1,…}} StateFeedbackGainsで計算 {"Weights",{p,…}} LQRegulatorGainsで計算 {"Gains",κ} 明示的に与えられたゲイン - 指定 {"method",pars,opts}では,オプション opts がゲイン計算関数に渡される.
- 出力{out1,…}および入力{in1,…}は部分指定であり,デフォルトでAllであるとみなされる.
例題
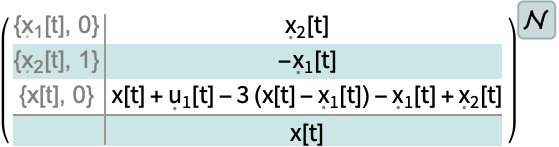
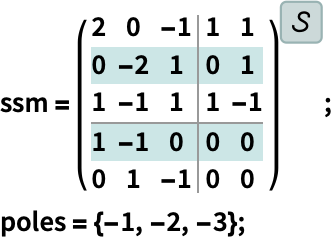
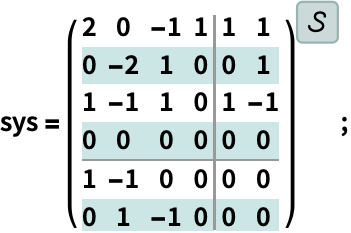
すべて開くすべて閉じる例 (1)基本的な使用例
https://wolfram.com/xid/01lg39xalr04hou5q-80xxz0
https://wolfram.com/xid/01lg39xalr04hou5q-znqwvt
https://wolfram.com/xid/01lg39xalr04hou5q-xcbb2q
https://wolfram.com/xid/01lg39xalr04hou5q-c6w8bj
https://wolfram.com/xid/01lg39xalr04hou5q-1dgu03
スコープ (8)標準的な使用例のスコープの概要

https://wolfram.com/xid/01lg39xalr04hou5q-xjnz24
https://wolfram.com/xid/01lg39xalr04hou5q-3k8jbh
https://wolfram.com/xid/01lg39xalr04hou5q-8kn0ux
https://wolfram.com/xid/01lg39xalr04hou5q-ep043b
https://wolfram.com/xid/01lg39xalr04hou5q-htwnxn
https://wolfram.com/xid/01lg39xalr04hou5q-8xa4ja
https://wolfram.com/xid/01lg39xalr04hou5q-hji5ng
https://wolfram.com/xid/01lg39xalr04hou5q-ly5htl

https://wolfram.com/xid/01lg39xalr04hou5q-inbizy
https://wolfram.com/xid/01lg39xalr04hou5q-nu8uni
AffineStateSpaceModelを調整する:
https://wolfram.com/xid/01lg39xalr04hou5q-sddj7a
NonlinearStateSpaceModelを調整する:

https://wolfram.com/xid/01lg39xalr04hou5q-xiwndc

https://wolfram.com/xid/01lg39xalr04hou5q-ptvzc
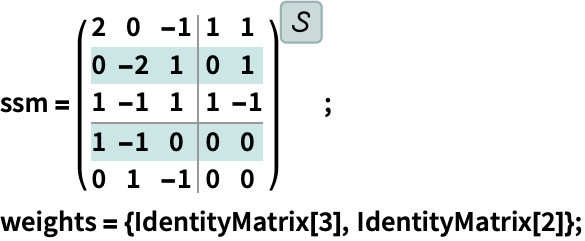
LQRegulatorGainsを使い,重みを指定することで安定化ゲインを計算する:

https://wolfram.com/xid/01lg39xalr04hou5q-8o8m6q

https://wolfram.com/xid/01lg39xalr04hou5q-p2ysoy
アプリケーション (6)この関数で解くことのできる問題の例
https://wolfram.com/xid/01lg39xalr04hou5q-pqn11a
https://wolfram.com/xid/01lg39xalr04hou5q-77gtvb
https://wolfram.com/xid/01lg39xalr04hou5q-8cr9mb
https://wolfram.com/xid/01lg39xalr04hou5q-8pn45c
https://wolfram.com/xid/01lg39xalr04hou5q-tkuy5g
https://wolfram.com/xid/01lg39xalr04hou5q-2bpvmz
https://wolfram.com/xid/01lg39xalr04hou5q-wmw4u1
https://wolfram.com/xid/01lg39xalr04hou5q-5a8gm9
https://wolfram.com/xid/01lg39xalr04hou5q-cdl42x
https://wolfram.com/xid/01lg39xalr04hou5q-ibddnl
https://wolfram.com/xid/01lg39xalr04hou5q-jvlb1j
https://wolfram.com/xid/01lg39xalr04hou5q-ooq5wa
https://wolfram.com/xid/01lg39xalr04hou5q-vyyqfu
https://wolfram.com/xid/01lg39xalr04hou5q-doy3xr
https://wolfram.com/xid/01lg39xalr04hou5q-klc2k1
https://wolfram.com/xid/01lg39xalr04hou5q-zl4v3q
https://wolfram.com/xid/01lg39xalr04hou5q-odqckk
https://wolfram.com/xid/01lg39xalr04hou5q-w97svn
https://wolfram.com/xid/01lg39xalr04hou5q-ktwtto
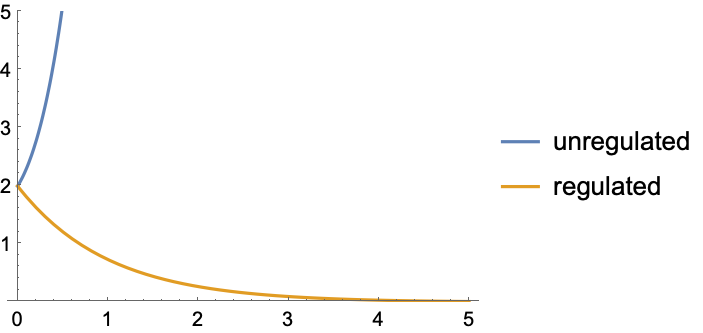
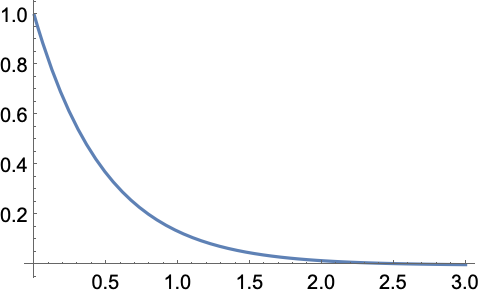
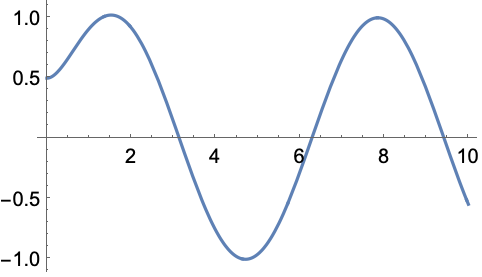
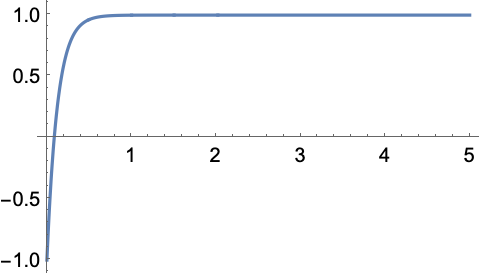
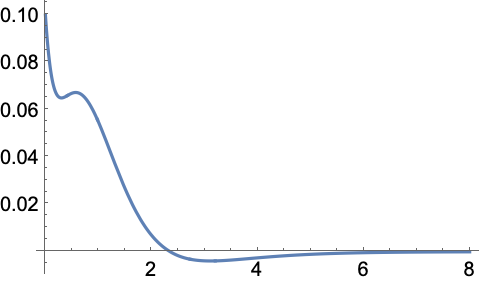
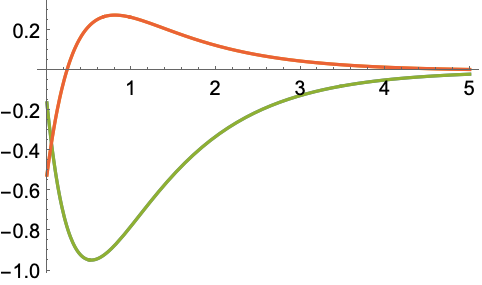
このシミュレーションは,出力がステップ信号を追跡していることを示している:

https://wolfram.com/xid/01lg39xalr04hou5q-0g88yk
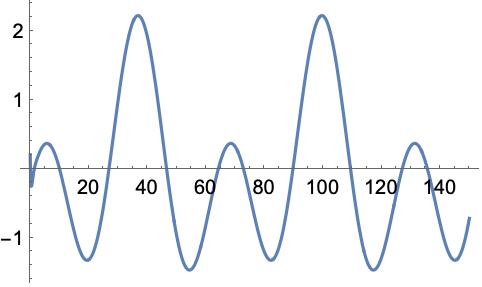
外乱がある場合の航空機の縦方向の力学を調整する:»

https://wolfram.com/xid/01lg39xalr04hou5q-y3lb4i
https://wolfram.com/xid/01lg39xalr04hou5q-14b6v0
https://wolfram.com/xid/01lg39xalr04hou5q-j95gbs
https://wolfram.com/xid/01lg39xalr04hou5q-tix8me
https://wolfram.com/xid/01lg39xalr04hou5q-1e0b5w
https://wolfram.com/xid/01lg39xalr04hou5q-kl30xb
https://wolfram.com/xid/01lg39xalr04hou5q-log4o3
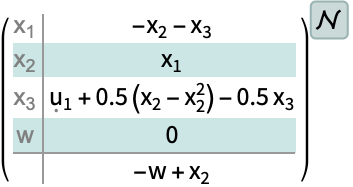
Rösslerのプロトタイプ-4の系を調整する:»
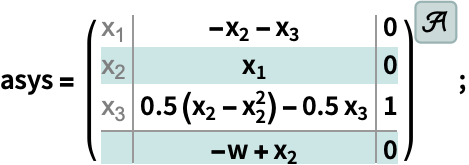
https://wolfram.com/xid/01lg39xalr04hou5q-qnma0x
https://wolfram.com/xid/01lg39xalr04hou5q-8nzejx
https://wolfram.com/xid/01lg39xalr04hou5q-vsgmni
https://wolfram.com/xid/01lg39xalr04hou5q-9jwmp1
https://wolfram.com/xid/01lg39xalr04hou5q-qhihbq

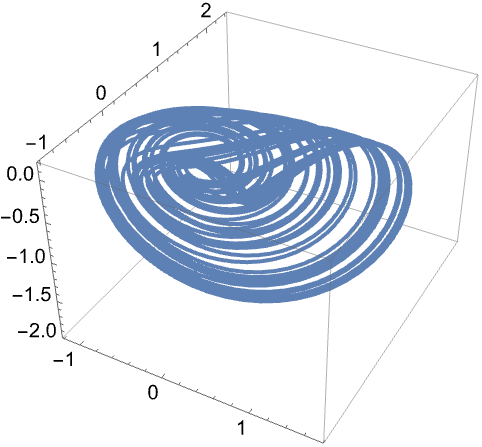
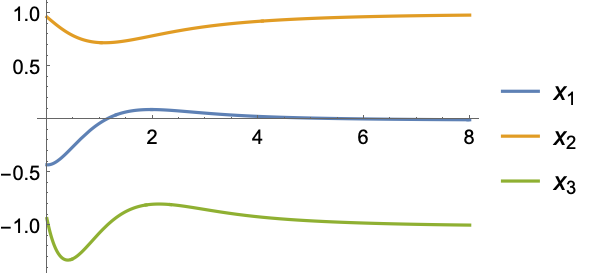
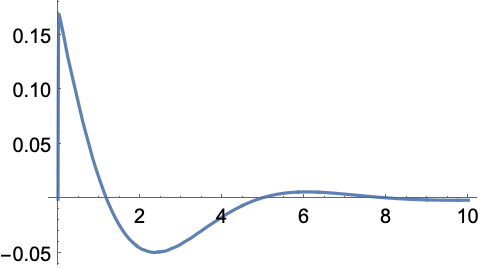
シミュレーションは,![]() が調整され系にフィードバックがあるカオス的動作がないことを示している:
が調整され系にフィードバックがあるカオス的動作がないことを示している:
https://wolfram.com/xid/01lg39xalr04hou5q-8blu31
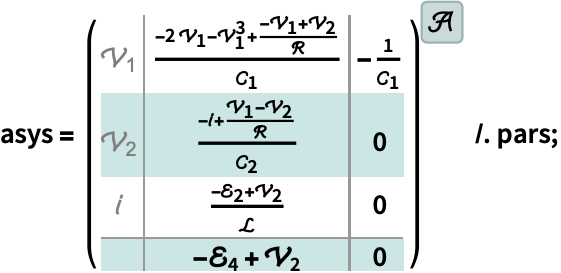
Chua回路中の電圧 ![]() を,他のChua回路の出力である外乱
を,他のChua回路の出力である外乱 ![]() を拒絶しつつ正弦曲線に従うように調整する:»
を拒絶しつつ正弦曲線に従うように調整する:»
https://wolfram.com/xid/01lg39xalr04hou5q-owf96l
https://wolfram.com/xid/01lg39xalr04hou5q-y49ytn
https://wolfram.com/xid/01lg39xalr04hou5q-v4mr7n
https://wolfram.com/xid/01lg39xalr04hou5q-n9ipd2
https://wolfram.com/xid/01lg39xalr04hou5q-6gbhuu
https://wolfram.com/xid/01lg39xalr04hou5q-gwt7o3
https://wolfram.com/xid/01lg39xalr04hou5q-4pvrjo
https://wolfram.com/xid/01lg39xalr04hou5q-xrmdal

https://wolfram.com/xid/01lg39xalr04hou5q-s5myjw
https://wolfram.com/xid/01lg39xalr04hou5q-kcesg6
特性と関係 (4)この関数の特性および他の関数との関係
StateFeedbackGainsは特殊ケースである:
https://wolfram.com/xid/01lg39xalr04hou5q-q2qlf6
https://wolfram.com/xid/01lg39xalr04hou5q-leqj70
https://wolfram.com/xid/01lg39xalr04hou5q-5tt0ls
LQRegulatorGainsは特殊ケースである:
https://wolfram.com/xid/01lg39xalr04hou5q-29bv7p
https://wolfram.com/xid/01lg39xalr04hou5q-unjs0m
https://wolfram.com/xid/01lg39xalr04hou5q-wrdtg7
SystemsModelStateFeedbackConnectを使って閉ループ系を得る:
https://wolfram.com/xid/01lg39xalr04hou5q-3iqdmg
https://wolfram.com/xid/01lg39xalr04hou5q-1qtz0r
https://wolfram.com/xid/01lg39xalr04hou5q-lrkd8o
https://wolfram.com/xid/01lg39xalr04hou5q-dxgwfp
https://wolfram.com/xid/01lg39xalr04hou5q-ywbfrc
https://wolfram.com/xid/01lg39xalr04hou5q-5u7rsj
Wolfram Research (2014), FullInformationOutputRegulator, Wolfram言語関数, https://reference.wolfram.com/language/ref/FullInformationOutputRegulator.html.テキスト
Wolfram Research (2014), FullInformationOutputRegulator, Wolfram言語関数, https://reference.wolfram.com/language/ref/FullInformationOutputRegulator.html.
Wolfram Research (2014), FullInformationOutputRegulator, Wolfram言語関数, https://reference.wolfram.com/language/ref/FullInformationOutputRegulator.html.CMS
Wolfram Language. 2014. "FullInformationOutputRegulator." Wolfram Language & System Documentation Center. Wolfram Research. https://reference.wolfram.com/language/ref/FullInformationOutputRegulator.html.
Wolfram Language. 2014. "FullInformationOutputRegulator." Wolfram Language & System Documentation Center. Wolfram Research. https://reference.wolfram.com/language/ref/FullInformationOutputRegulator.html.APA
Wolfram Language. (2014). FullInformationOutputRegulator. Wolfram Language & System Documentation Center. Retrieved from https://reference.wolfram.com/language/ref/FullInformationOutputRegulator.html
Wolfram Language. (2014). FullInformationOutputRegulator. Wolfram Language & System Documentation Center. Retrieved from https://reference.wolfram.com/language/ref/FullInformationOutputRegulator.htmlBibTeX
@misc{reference.wolfram_2025_fullinformationoutputregulator, author="Wolfram Research", title="{FullInformationOutputRegulator}", year="2014", howpublished="\url{https://reference.wolfram.com/language/ref/FullInformationOutputRegulator.html}", note=[Accessed: 02-April-2025
]}BibLaTeX
@online{reference.wolfram_2025_fullinformationoutputregulator, organization={Wolfram Research}, title={FullInformationOutputRegulator}, year={2014}, url={https://reference.wolfram.com/language/ref/FullInformationOutputRegulator.html}, note=[Accessed: 02-April-2025
]}