

SpatialPointData
SpatialPointData[points]
points で与えられる空間点配置を表す.
SpatialPointData[points,reg]
領域 reg 内の点集合を表す.
SpatialPointData[pointsvals,…]
値 vals と場所 points を関連付ける.
SpatialPointData[points<key1vals1,…>,…]
キーと値の連想 keyivalsiを関連付ける
SpatialPointData[{p1data1,p2data2,…},…]
関連付けられた値{data1,data2,…}がある空間点集合{p1,p2,…}を表す.
SpatialPointData[{points1,points2,…},…]
空間点の複数の集合を表す.
SpatialPointData[{points1anns1,points2anns2,…},…]
注釈を含む複数の空間点集合を表す.
詳細とオプション




- 空間的な点集合は空間点パターンとしても知られている.
- 空間的な点配置は観測領域 reg を含む点の集合で,各点についての注釈が含まれることもある.
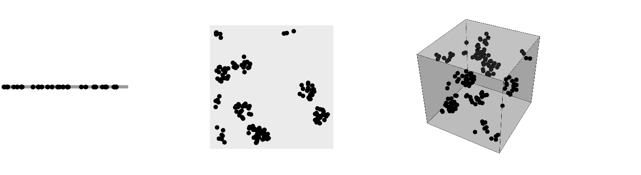
- 点配置は任意の次元でよい.典型的な1Dの点には,顧客の到着やサーバージョブの到着等の時間内の事象がある.典型的な2Dの点には,サンプル内のセルの位置,木の位置,犯罪または病気の位置等がある.典型的な3Dの点には,星や銀河団の位置,コンクリートの集合体の位置,材料の欠陥の位置等がある.
-
- 点 points は以下の形式でよい.
-
{p1,p2,…} 幾何学的な点 pi∈d GeoPosition[…],GeoPositionXYZ[…],… 地理的な点 - 点配置についての正しい統計を生成するためには,観測領域 reg は重要である.
-

- 観測領域 reg が与えられていない場合は,RipleyRassonRegionを使って領域が自動的に計算される.
- 観測領域 reg は,SpatialObservationRegionQでテストできるようなパラメータがない全次元の有界な領域で なければならない.
- 空間点には,各点に関連した追加的な情報を与える注釈があってもよい.これらは,通常は,マークおよび共変量と呼ばれる.
- よく使われるマークには,胸高における樹径と樹種があり,よく使われる共変量には樹木の場合の高さである.
- 次は,注釈の特性である.
-
"Annotations" 最初の点配置の注釈 {"Annotations",n} n 番目の点配置の注釈 "AnnotationsList" すべての点配置の注釈のリスト {…,"key"} 指定されたキー"key"の注釈を返す - 注釈は,AnnotationKeys,Annotate,AnnotationValue等の関数を使って取り出したり加えたりできる.
- 以下は基本的な特性である.
-
"Summary" データ情報の表 "Dimension" 点座標の次元性 "ObservationRegion" 観測領域 "RegionMeasure" 観測領域の寸法 "ConfigurationCount" 点配置の数 "Points" 最初の配置の点座標 "PointsList" すべての配置の点座標 "PointCount" 最初の点配置中の点の数 "PointCountList" すべての点配置に含まれる点の数 "MeanPointCount" すべての点配置についての点の平均数 "MeanPointDensity" すべての点配置についての点の平均密度 "FryPlot" 方向性がある散布図 - SpatialPointData[sdata,newreg]は,新たな観測領域が newreg ともとの観測領域の共通部分である,もとの空間点データの部分集合を作る.
- SpatialPointDataは,HistogramPointDensity,RipleyK,SpatialRandomnessTest等の関数と一緒に使うことができる.
例題
すべて開く すべて閉じる例 (2)
スコープ (22)
基本的な用法 (8)
異なるデータ点の間のすべてのベクトルをプロットすることでハードコア半径を識別する:
ベクトルのプロットはフライ(Fry)プロットと呼ばれるもので,空間点データから直接抽出することができる:
ランダムな測地点からSpatialPointDataを構築する:
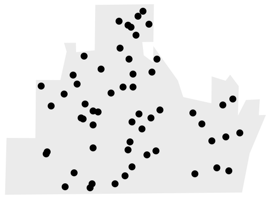
国の多角形で指定された領域でSpatialPointDataを作る:
GeoElevationDataを使ってメキシコ上の構造格子を取得する:
ResourceObjectからデータを得る:
領域 (3)
SpatialPointDataは点が発生する観測領域について定義される:
観測領域は,指定されていなければRipley–Rasson推定器(凸包の膨張)で推定される:
変換 (3)
注釈 (6)
SparseArrayを使ってパターンの部分集合に注釈を割り当てる:
GeoPositionで定義された空間データに注釈を加える:
配置 (2)
すべての点は位置を個々のSpatialPointDataオブジェクトとして抽出する:
アプリケーション (8)
特性と関係 (2)
テキスト
Wolfram Research (2020), SpatialPointData, Wolfram言語関数, https://reference.wolfram.com/language/ref/SpatialPointData.html.
CMS
Wolfram Language. 2020. "SpatialPointData." Wolfram Language & System Documentation Center. Wolfram Research. https://reference.wolfram.com/language/ref/SpatialPointData.html.
APA
Wolfram Language. (2020). SpatialPointData. Wolfram Language & System Documentation Center. Retrieved from https://reference.wolfram.com/language/ref/SpatialPointData.html